📘 Branch-and-Bound: Assignment Problem
1️⃣ Introduction to Branch-and-Bound
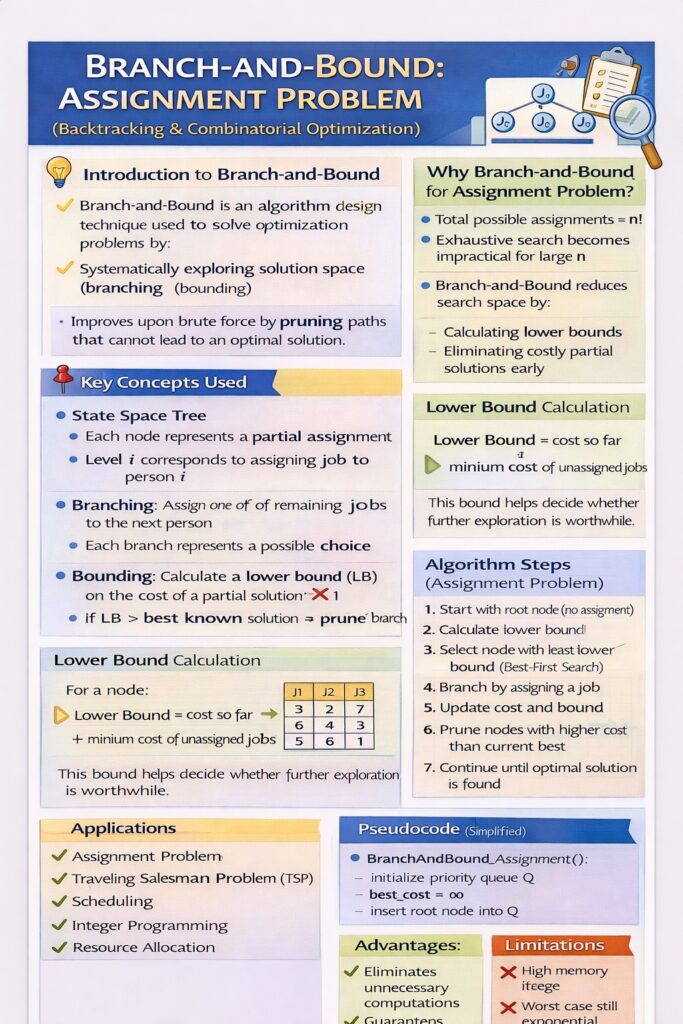
Branch-and-Bound is an algorithm design technique used to solve optimization problems by:
- Systematically exploring solution space (branching)
- Eliminating suboptimal solutions using bounds (bounding)
It improves upon brute force by pruning paths that cannot lead to an optimal solution.
2️⃣ What is the Assignment Problem?
The Assignment Problem is a fundamental combinatorial optimization problem.
🔹 Problem Statement
Given:
- n jobs and n persons
- A cost matrix C, where
C[i][j]= cost of assigning job j to person i
Objective:
Assign exactly one job to each person such that the total assignment cost is minimum.
3️⃣ Why Branch-and-Bound for Assignment Problem?
- Total possible assignments = n!
- Brute force becomes impractical for large n
- Branch-and-Bound reduces search space by:
- Calculating lower bounds
- Eliminating costly partial solutions early
4️⃣ Key Concepts Used
🔹 1. State Space Tree
- Each node represents a partial assignment
- Level i corresponds to assigning job to person i
- Leaf node → complete assignment
🔹 2. Branching
- Assign one of the remaining jobs to the next person
- Each branch represents a possible choice
🔹 3. Bounding
- Calculate a lower bound (LB) on the cost of a partial solution
- If LB ≥ best known solution → prune branch
5️⃣ Lower Bound Calculation
For a node:
Lower Bound = cost so far
+ minimum cost of unassigned jobs
This bound helps decide whether further exploration is worthwhile.
6️⃣ Algorithm Steps (Assignment Problem)
- Start with root node (no assignment)
- Calculate lower bound
- Select node with least lower bound (Best-First Search)
- Branch by assigning a job
- Update cost and bound
- Prune nodes with higher cost than current best
- Continue until optimal solution is found
7️⃣ Pseudocode (Simplified)
BranchAndBound_Assignment():
initialize priority queue Q
best_cost = ∞
insert root node into Q
while Q is not empty:
node = extract node with least lower bound
if node is a complete solution:
update best_cost
else:
for each possible job assignment:
create child node
compute lower bound
if lower bound < best_cost:
insert child into Q
8️⃣ Example (3×3 Assignment Problem)
Cost Matrix:
| Person / Job | J1 | J2 | J3 |
|---|---|---|---|
| P1 | 9 | 2 | 7 |
| P2 | 6 | 4 | 3 |
| P3 | 5 | 8 | 1 |
🔹 Optimal Assignment:
- P1 → J2 (2)
- P2 → J1 (6)
- P3 → J3 (1)
Minimum Cost = 9
Branch-and-Bound avoids checking all 6 permutations.
9️⃣ Time and Space Complexity
🔹 Time Complexity
- Worst case: O(n!)
- Practical performance is much better due to pruning
🔹 Space Complexity
- Stores nodes in priority queue
- O(n!) in worst case
🔟 Advantages of Branch-and-Bound
✔ Eliminates unnecessary computations
✔ Guarantees optimal solution
✔ More efficient than brute force
✔ Suitable for optimization problems
1️⃣1️⃣ Limitations
✖ High memory usage
✖ Worst-case still exponential
✖ Complex to implement
1️⃣2️⃣ Applications
- Assignment Problem
- Traveling Salesman Problem (TSP)
- Scheduling
- Integer programming
- Resource allocation
🔚 Conclusion
The Branch-and-Bound technique is a powerful method for solving the Assignment Problem efficiently by combining systematic search and intelligent pruning.
Branch-and-Bound explores only promising solutions while guaranteeing optimality.